Нижний Новгород, Россия
- Купить с доставкой
- 8-920-061-07-63
Мастер-класс: «Роборука» - захват кубиков по датчику
-
Автор статьи Виктор Будашов
Всем привет! Думаем, что каждый мечтал о роботе, который бы захватывал предметы и переносил их. Мы нашли решение! Робот + рука = «Роборука». Бинго!
Сегодня мы предлагаем запрограммировать робота следующим образом: «Роборука» находит кубик с помощью инфракрасного датчика, захватывает и поднимает его, поворачивается на 90 градусов и отпускает кубик.
Вместо кубика, Вы можете взять любой другой предмет! Но помните, что он не должен превышать по габаритам размах клешни робота. Рекомендуем взять небольшую фигурку, например, игральный кубик.
Для работы потребуется:
– собранная Роборука (обязятельно с закрепленным датчиком!);
– небольшой предмет (робот будет его захватывать);
– подставка для робота (желательна для устойчивой работы).
Без наличия программы, «Роборука» не будет функционировать. Размещаем пример кода:
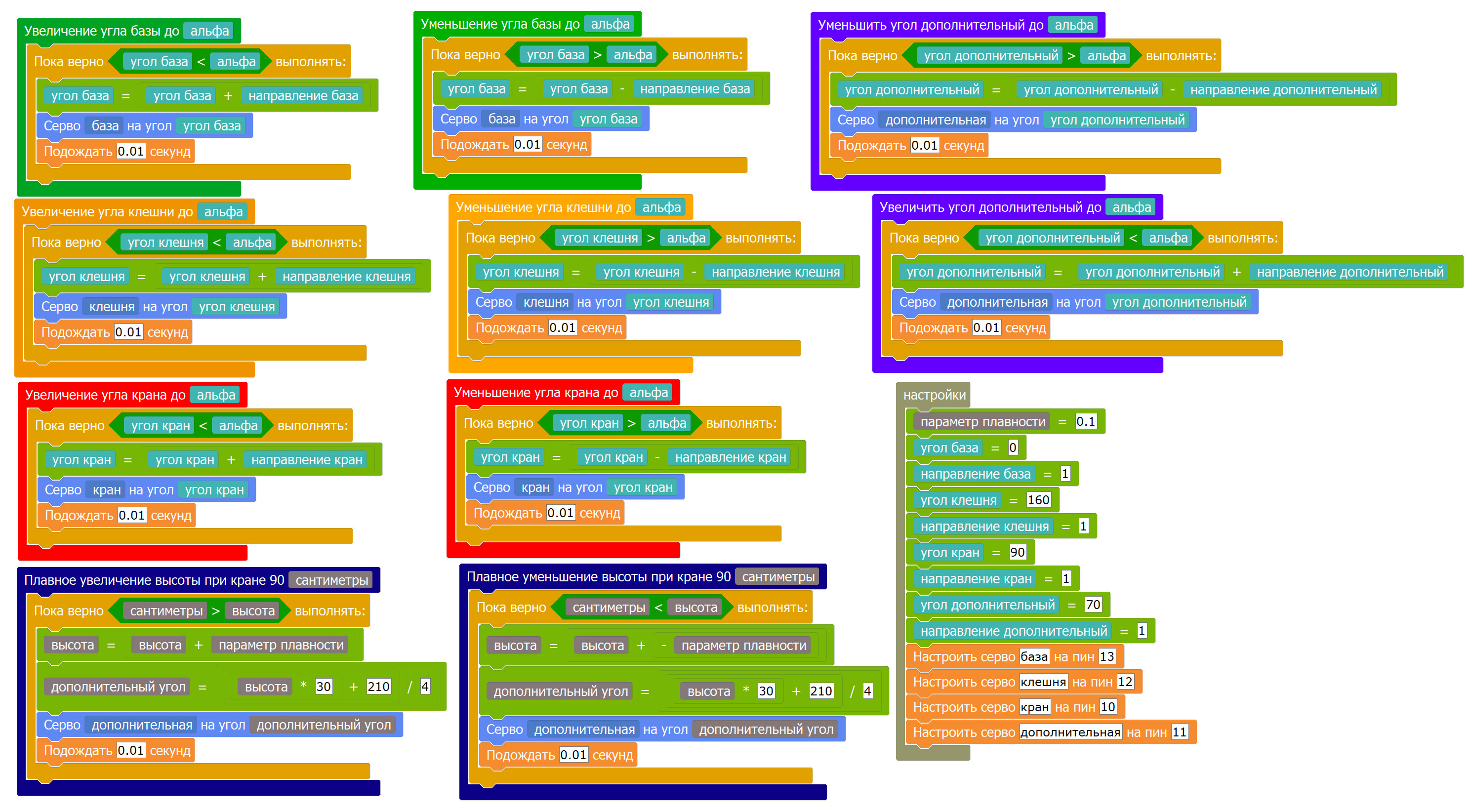 Для начала создаем необходимые нам функции поворота следующих моторов: базы, клешни и дополнительной сервы, с помощью которых мы будем изменять положение «Роборуки» в пространстве. Это уже знакомые функции из нашего основного курса. Теперь пришло время собрать все начальные положения моторов в блок «Настройки» и сложить цикл работы «Роборуки»
Для начала создаем необходимые нам функции поворота следующих моторов: базы, клешни и дополнительной сервы, с помощью которых мы будем изменять положение «Роборуки» в пространстве. Это уже знакомые функции из нашего основного курса. Теперь пришло время собрать все начальные положения моторов в блок «Настройки» и сложить цикл работы «Роборуки»
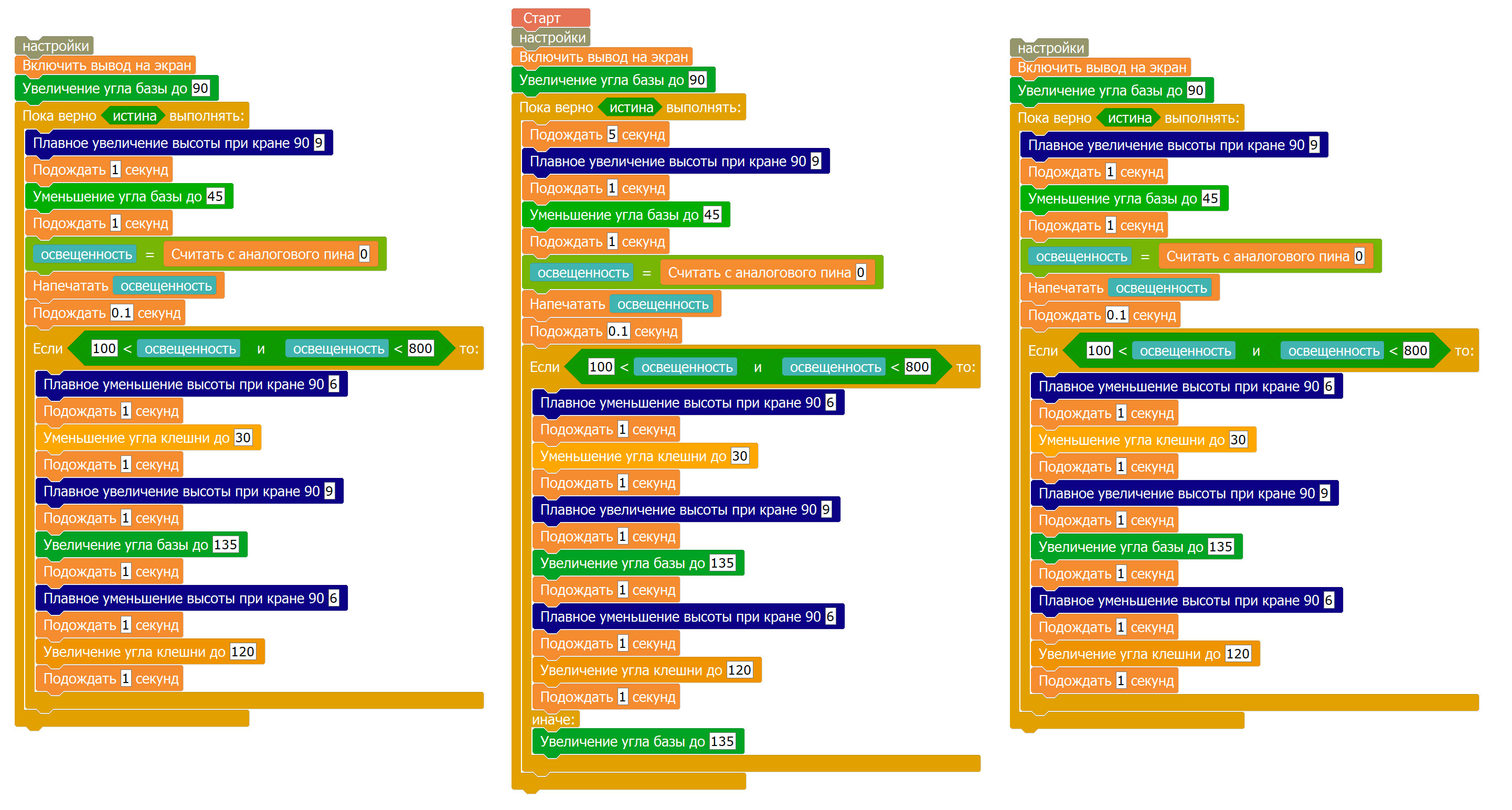 Не забываем в начале программы поставить условия на поиск кубика в исходной позиции, если кубик присутствует - «Роборука» захватывает его и переносит на 90 градусов.
Не забываем в начале программы поставить условия на поиск кубика в исходной позиции, если кубик присутствует - «Роборука» захватывает его и переносит на 90 градусов.
Посмотрите как такой алгоритм работает у нас:
Похожие статьи:
-

Мастер-класс: «Танк» следует за препятствием
Робот «Танк» следует за объектом с помощью датчика - сонара -

Мастер-класс: Робот «Танк» - параллельная парковка
«Танк» выполняет параллельную парковку между другими роботами! -

Мастер-класс: Робот «Тягач»
Робот «Танк» тянет пострадавшего робота -

Мастер-класс: «Роборука» лопает Pop It
«Роборука» лопает современный антистресс Pop It! -

Мастер-класс: Конвейер из «Роборук»
Роборуки переносят объект, как на конвейере! -

Мастер-класс: «Роборука» скатывает шарик с горки
Робот «Роборука» захватывает шарик, поднимает его и скатывает с горки!