Нижний Новгород, Россия
Шаговый двигатель
-
Автор статьи Михаил Проявин
Итак, мы уже рассказали, как устроен серво мотор и сегодня начнем разбирать шаговый двигатель, его схему, драйверы управления и то, где его лучше всего использовать!
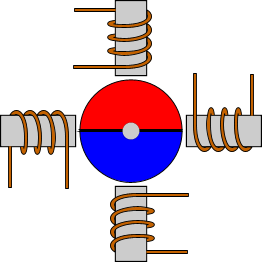
Начнем мы с того, что "на пальцах" рассмотрим принцип функционирования данной железяки. Каждый шаговик имеет внутри себя несколько электромагнитов, расположенных вокруг вала. Подавая питание в нужной последовательности на каждую из них, вращающийся элемент двигателя стремится примагнититься катушке. Быстрым переключением питания между электромагнитами можно добиться большой скорости вращения вала мотора и перемещать его в любое положение с большой точностью. Однако для обеспечения этой точности используются различные вспомогательные устройства, так как такой тип двигателя имеет крайне неприятной эффект вибрации. О таких нюансах мы и расскажем далее!
Любой шаговый двигатель имеет два основных элемента: ротор (вал мотора) и статор (неподвижный корпус). Первый состоит из обычных магнитов, а второй - из электрических, управляемых катушек. Стоит отметить, что как раз за счет шагов от одной катушке к другой в шаговиках присутствует вибрация, вызванная инерцией вала мотора. Профили магнитов, принципы управления электромагнитами - все это разделяет шаговики на типы и наделяет их своими плюсами и минусами.
Разделим шаговики на 3 основных класса:
- Переменный шаговый двигатель
Ротор не имеет постоянных магнитов, а оснащен ферромагнитной шестерней. Это материал, который крайне эффективно магнититься, но не так сильно по сравнению с постоянным. Это приводит к проигрышу в крутящем моменте. Зато отсутствует стопорящая сила, возникающая за счет магнитного поля между корпусом мотора и ротором с постоянным магнитом, которую легко почувствовать, покрутив шаговик в выключенном состоянии (характерные щелчки).
Движок оснащен большим количеством катушек, которые включаются попарно. Величина шага варьируется от 5 до 15 градусов.
- Шаговый двигатель с постоянным магнитом
Ротор такого устройства состоит из нескольких разнополюсных магнитов. Принцип разбирали в самом начале. Характерный шаг от 45 до 90 градусов.
- Гибридный шаговый двигатель
Как можно догадаться, данный тип совместил в себе первые два и унаследовал все плюсы. Отличительными характеристиками данного шаговика являются высокая точность (1-5 градуса), малая вибрация и приличная скорость вращения. Все хорошо, но такие штуки отличаются от своих собратьев еще и ценой! Это связано со сложностью изготовки. Но производители пошли на технологическую хитрость. Практически невозможно создать многозубцовую (скажем, 100) шестеренку, где соседние зубья будут разных полюсов.

Но достаточно просто создать два таких диска, имеющих противоположные полюса. Затем их сдвигают так, что если посмотреть сбоку, получится то, что мы и хотели. Осталось правильным образом расположить обмотки и включать их по оптимальной логике, обеспечивающей наибольшую эффективность!
Теперь давайте пробежимся по методам управления шаговыми двигателями. Их также можно разделить на несколько пунктов:
- Полношаговое управление одной обмоткой
Это самый простой вариант. Последовательно включается только одна катушка и к ней притягивается вал мотора. В таком случае крутящий момент будет меньше чем в следующем способе.
- Полношаговое управление двумя обмотками
Принцип такой же, как и в предыдущем случае, но теперь управление идет парой электромагнитов. Это обеспечивает максимальный крутящий момент мотора, но требует в два раза больше тока или напряжения (зависит от метода подключения катушек друг к другу).
- Полушаговое управление
Данная логика включения катушек позволит увеличить число шагов, а, следовательно, и точность в 2 раза! Аналогично предыдущим пунктам, можно управлять одной катушкой или парой. Вся фишка в том, что в данном случае переход на следующую катушку происходит не при полном выключении предыдущей. То есть, при работе двух соседних катушек вал мотора встает в промежуточное состояние.
- Сверхточное управление
Наверное, у многих после предыдущего пункта появилась мысль: а что если мы будем подавать разную мощность на две соседние катушки, меняющуюся по определенному закону, и получим еще больше промежуточных шагов? Именно так и устроены современные двигатели в сверхточных ЧПУ и прочих подобных устройствах. Хитрое управление обмотками позволяет значительно повысить точность позиционирования подобных моторов. В таких случаях используют специальные драйверы для шаговых двигателей, позволяющих осуществлять подобный режим управления.
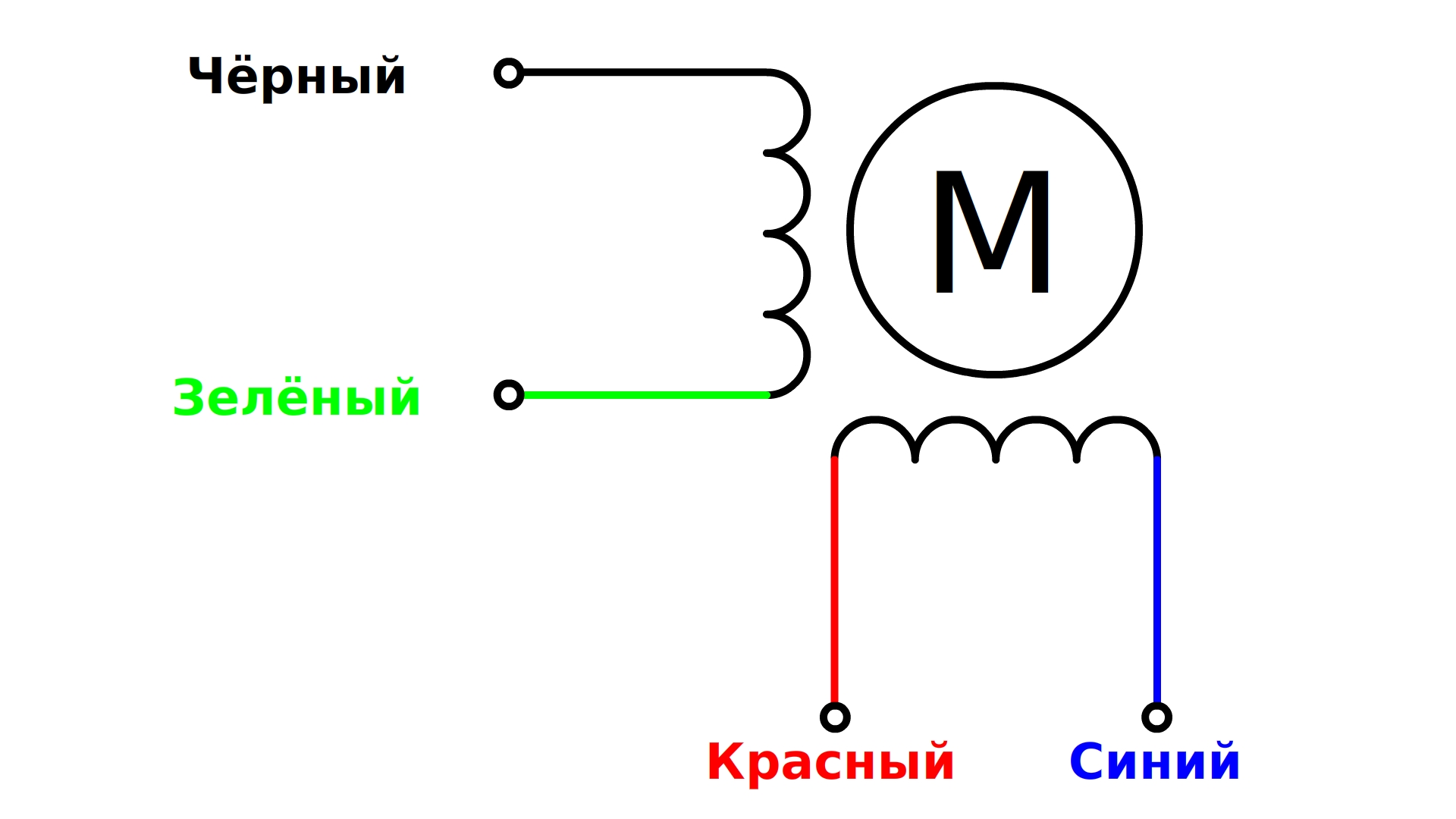
В качестве примера в данной статье рассмотрим подключения двух шаговых двигателей к плате Arduino. Для начала рассмотрим мотор 17hs4401, которой используется в 3D принтерах. Данная модель является биполярной, то есть у нас есть две пары обмоток от которых идет 4 кабеля.

Шаговый двигатель 17hs4401 обладает большим крутящим моментом и может питаться от сети 12 V. Чтобы не перегружать нашу плату управления большими мощностями, шаговик подключается к ней с помощью специального драйвера А4988, который способен работать в жестких условиях (до 35 V и 2 А).
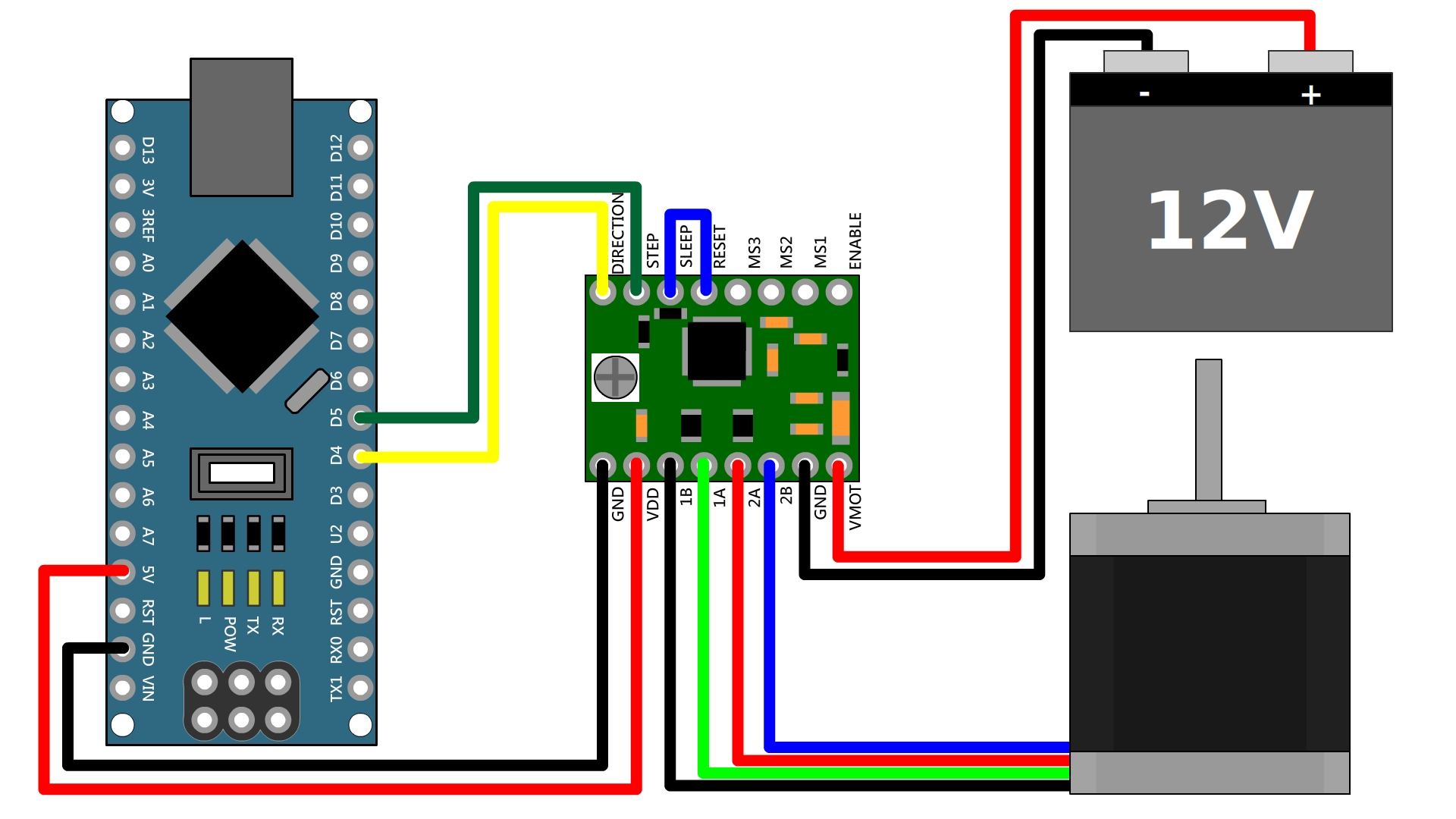
Слабые управляющие сигналы с Arduino идут на драйвер, а тот уже взаимодействует с 17hs4401 с более мощными параметрами по току и напряжению. К ножкам A4988 VDD и GND подводится питание логического уровня (3 - 5,5 В), к VMOT и GND - питание двигателя (8 - 35 В). Стоит отметить, что в данной системе бывают скачки напряжения, которые могут привести к поломке оборудования. Поэтому (на 3D принтерах всегда) ставят большие конденсаторы (более 47 мкФ). Драйвер имеет болт, который регулирует силу тока. Работая на предельных значениях, вы рискуете сжечь его, особенно если не наклеен радиатор, идущий в комплекте с устройством.
Шаговик 17hs4401 за полный оборот совершает 200 шагов. Это весьма неплохо, но для лучшего позиционирования (крайне важно для ЧПУ) используют схему управления с микрошагами, которую мы изучили ранее. A4988 позволяет осуществлять такую процедуру с коэффициентами 1/2, 1/4, 1/8 и 1/16 шага (комбинируя управление через выходы MS1, MS2, и MS3).
| MS1 | MS2 | MS3 | Step |
| Low | Low | Low | Full |
| High | Low | Low | 1/2 |
| Low | High | Low | 1/4 |
| High | High | Low | 1/8 |
| High | High | High | 1/16 |
Пин STEP отвечает за микрошаг шаговика, DIRECTION - за направление вращения.
Теперь давайте перейдем непосредственно к подключению данного мотора к микрокомпьютеру. Соединяем контакты согласно указанной ниже схеме:
Обычно, такие моторы используются любителями при сборке 3d принтеров своими руками. Для этого используют Arduino MEGA и шилд ramps 1.4, о котором мы говорили в этой статье. Удобство использования данного комплекта состоит в том, что не нужно соединять кучу проводов - за вас уже все разведено. Таким образом, легко подключить сразу до 5 шаговиков!
Более простым и дешевым вариантом шагового мотора является модель 28byj-48. Его подключение немного запутанное, но несмотря на это он пользуется большой популярностью у любителей собирать роботов! Поэтому мы немного расскажем о том, как 28byj-48 подключить к Arduino. В первую очередь нам понадобиться драйвер ULN2003APG. Это очень дешевая железяка, встречается как готовая плата с разъемами, так и просто чип с голыми ножками. Сначала посмотрим, как подключать второй вариант.
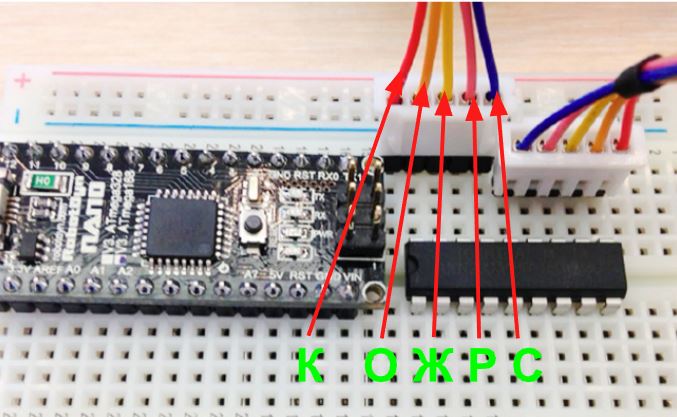
На данной картинке покано подключение двух шаговых двигателей к плате Arduino Nano. C обратной стороны драйвера все ножки соединяем с цифровыми пинами, кроме крайней правой - ее ведем к GND. При программировании вам потребуется осуществить настройку моторов к пинам и в этом случае необходимо указать правильную последовательность: оранжевый, синий, желтый, розовый. Именно в таком порядке необходимо будет подавать управляющий сигнал с ножек микропроцессора. Как видно на рисунке, красный провод левого коннектора не попадает на ULN2003APG - его необходимо соединить с выходом 5V или VIN.
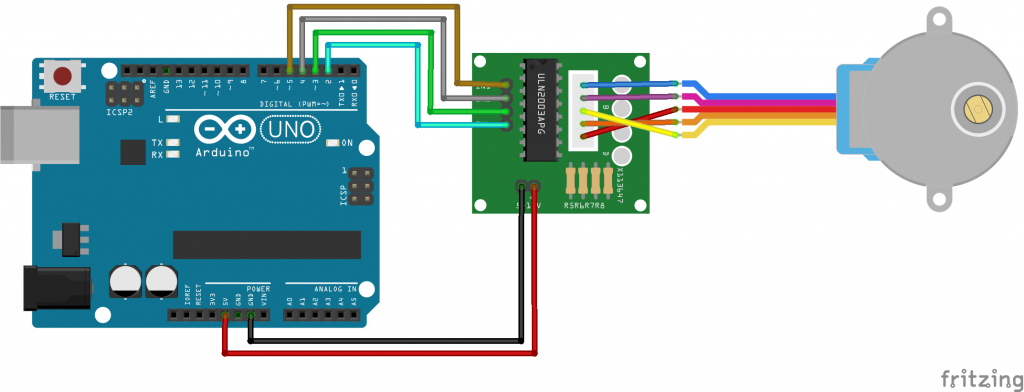
Есть более простой способ подключения шаговика 28byj-48 через готовую плату с коннектором:
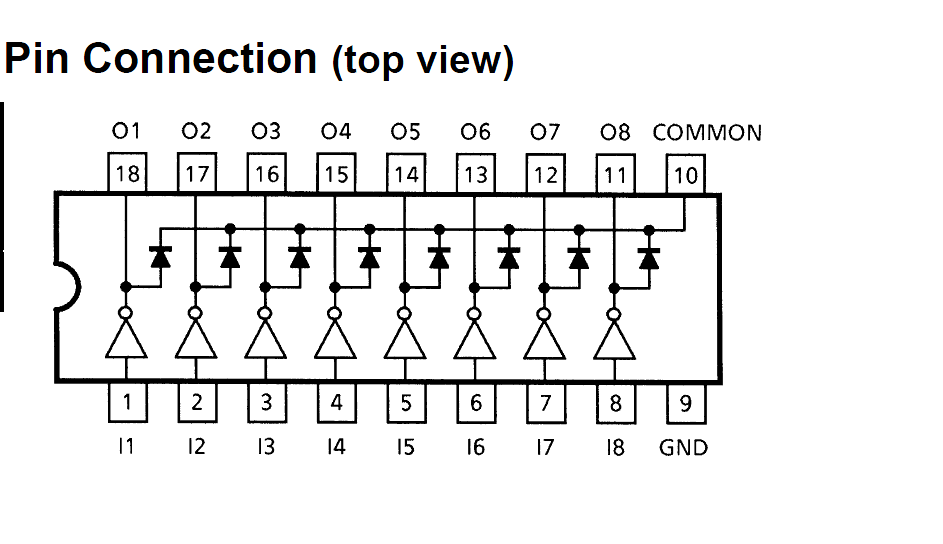
На всякий случай приведем распиновку драйвера:
На этом у нас все, если будут вопросы - всегда готовы ответить!
Похожие статьи:
-

Датчик освещенности ARDUINO
В этой статье мы расскажем о датчике освещенности ARDUINO, где разберем его виды, методы подключения и программирования. -

Подключение реле к Arduino
Разберемся, как связать высоковольтную и низковольтную электрическую цепь с Arduino через реле, что будет крайне полезно для создания Умного Дома. -

Шаговый двигатель
Продолжаем цикл полезных статей по окружающей нас электронике! -

Робототехника в Нижнем Новгороде
Давайте разберемся, как сильно развивается робототехника в Нижнем Новгороде. -

Серво моторы
Новая статья про серво моторы, которые наиболее часто используются для робототехники. -

Подключение Arduino
В этой статье мы расскажем, как правильно подключить плату Arduino к компьютеру!